I am happy to announce that my paper showcasing a mechanically controlled SMA inchworm robot, has been in published in Elsevier Sensors and Actuators A: Physical.
https://doi.org/10.1016/j.sna.2021.113115
Abstract:
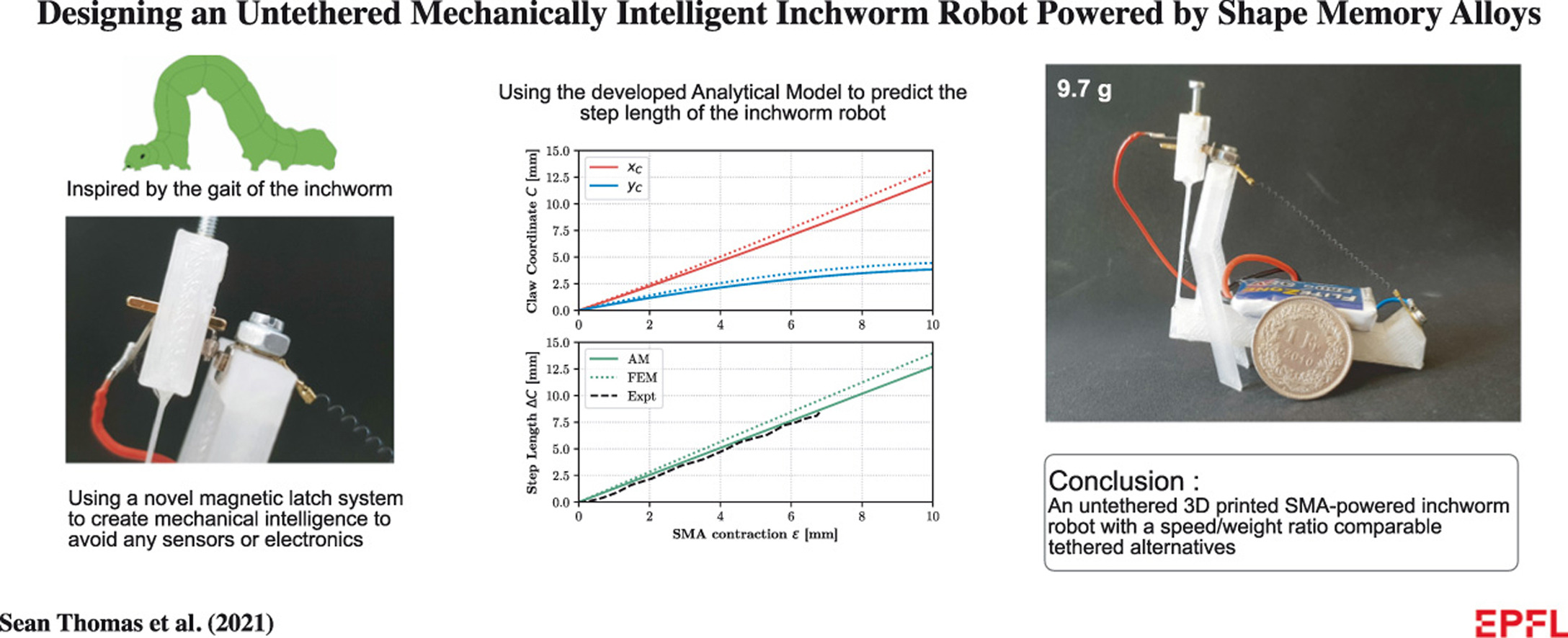
Shape Memory Alloy (SMA) based actuators have become ideal candidates for use in compact and lightweight applications. These smart materials have often been referred to as artificial muscles due to their high work volume density. In this paper, a flexure-based SMA powered mechanical oscillator is developed to create an inchworm robot. Here, a novel magnetic latch system is used to create a mechanically-intelligent system that allows the abstraction of any sensors such as temperature probes. This insect robot, weighing only 9.7 g, operates without any control logic or micro-controller and is able to perform a crawling gait untethered. An analytical model of the thermal properties of the SMA coil, for the sizing of the robot speed, and an analytical model of the step length of the insect robot is presented and validated. A working prototype, with a speed of 1.55 mm/s, is showcased in this work.