Selected Work
Eight projects across smart actuation, compliant design, and biomedical robotics.
Each project answers the same question from a different angle: how much of a robot's behaviour can live in its physical structure, rather than its controller? The work spans industrial grippers, aerial manipulators, endovascular crawlers, and actuators implanted inside living tissue.
-
01 / 08
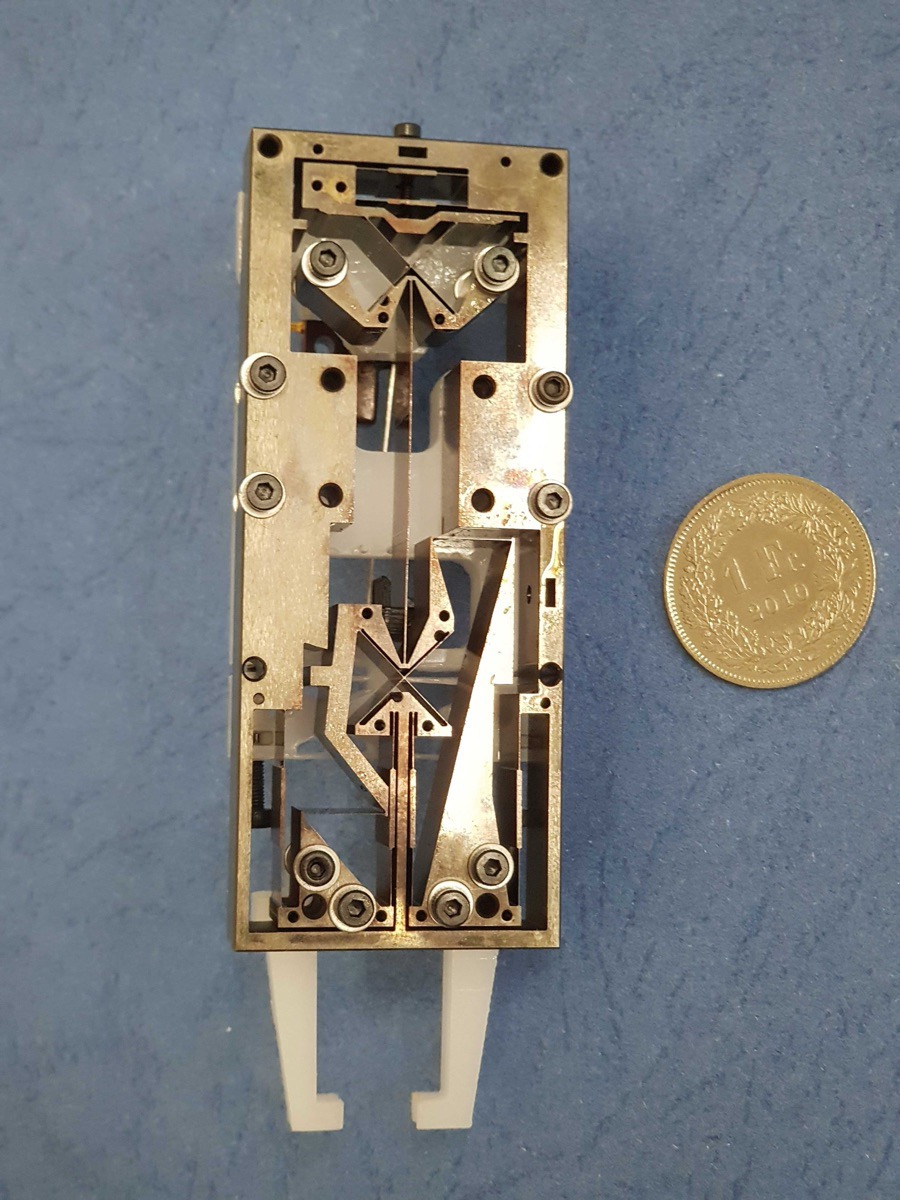
Industrial Manipulator
Most grippers waste energy holding what they've already grabbed. This one doesn't. A flexure-based end-effector powered by antagonistic SMA coils, it snaps between open and closed states and consumes power only during the transition, not while maintaining the grasp. The bistable snap-through behaviour is engineered into the structure itself using a precision-buckled beam, analytically modelled via Euler-Bernoulli beam theory, producing a defined force threshold, repeatable actuation, and zero wear over cycles.
Design and Modelling of a Flexure-based Bistable Gripper Powered by Shape Memory Alloys IOP Smart Materials and Structures, 2025 -
02 / 08
Aerial Gripper
Seventeen grams. No motor. No gearbox. No tether. This four-prong compliant gripper is 3D-printed and powered entirely by SMA wire, exploiting the exceptional energy-to-weight ratio of shape memory alloys to deliver meaningful grasping force within an envelope most actuators cannot match. Topology optimisation algorithmically generated the geometry, finding load paths and material distributions that intuition alone would not reach. A self-biasing design means the gripper passively conforms to cylindrical payloads without active control.
A Self-Biasing Shape Memory Alloy Gripper for Lightweight Applications IEEE/RSJ IROS, 2021 -
03 / 08
Artificial Muscle
Not a device worn on top of the body. A device implanted inside it. This fully implantable actuator measures just 9 mm in diameter and 30 mm in length, yet generates forces comparable to a native lateral gastrocnemius muscle belly, which it directly replaces via bone anchor and Achilles tendon fixation. Validated in a bipedal animal model through live survival surgeries and cadaveric specimens, the actuator operates at up to 770 mm/s, equivalent to 77 stroke lengths per second. It functions as a tunable clutch: a programmable slack length modulates the timing and magnitude of assistive force during each gait cycle.
An Implantable Variable Length Actuator for Modulating in Vivo Musculo-Tendon Force IEEE/RSJ IROS, 2023 -
04 / 08
Compliant Bone Anchor
This device turns failure into a feature. A staged-deployment bone anchor that activates through a sequence of controlled mechanical breakages, each fracture occurring at a precisely designed load threshold to progressively engage the bone, apply a calibrated tensile preload, and promote long-term osseointegration. The entire sequence is passive, deterministic, and requires no sensors, no electronics, and no external trigger once implanted. A complex, multi-step deployment is encoded entirely in geometry.
Implanted Brace Devices, Methods, and Systems (U.S. Provisional) USPTO Patent -
05 / 08
Artery Crawling Robot
What if a robot could walk without a brain? This sensorless, electronics-free crawler navigates the inside of arteries by encoding its gait directly into a compliant structure. There is no controller sequencing the leg movements, no actuator switching logic, and no feedback loop. Instead, the interaction between the robot's compliant legs and a variable tube profile programs the locomotion cycle purely through mechanics. Tune the geometry, change the gait.
Implanted Brace Devices, Methods, and Systems (U.S. Provisional) USPTO Patent -
06 / 08
Inchworm Robot
No microcontroller. No sensors. No battery-hungry control logic. Just a 9.7g robot that crawls. Powered by a shape memory alloy mechanical oscillator, this untethered robot generates a two-anchor crawling gait through a periodic snap-through cycle regulated by a passive magnetic latch. The locomotion emerges entirely from structural mechanics: the oscillation frequency, gait timing, and ground contact are all encoded in the physical design.
An Untethered Mechanically-Intelligent Inchworm Robot Powered by a Shape Memory Alloy Oscillator Sensors and Actuators A: Physical, 2021 -

07 / 08
Biosynthetic Thumb
Traditional prosthetics are designed to fit a body that was never designed to receive them. This project rejects that premise. The biosynthetic thumb co-engineers the surgical intervention and the device in parallel: the procedure creates an optimised anchor and sensory interface, while the prosthesis geometry is built around the modified anatomy. Neither is designed around the other; both are designed together.
A Biosynthetic Thumb Prosthesis npj Biomedical Innovations, 2025 -
08 / 08
Affordable ExoGlove
One print. No support material. No assembly. This compliant finger orthosis is designed to assist both flexion and extension from a single 3D-printed part, using a sinusoidal flexure pattern that bends naturally with the finger while transmitting force in both directions. FEA-driven parametric optimisation across wall thickness, width, and pattern spacing gives full control over device stiffness without redesign.
A 3D-Printed Hand Exoskeleton for Affordable and Accessible Upper Limb Rehabilitation IEEE EMBC, 2025
